見えない力、磁気の力
世の中には見えない力がたくさんあります。この中で工学的に多く応用されているのが電磁力です。代表的なものは入力されたエネルギーを機械的運動に変換する装置でアクチュエータと言われるものです。この他にも物を浮かせたり、物体内部に熱を発生させたりと磁気の力でいろいろなことが実現可能です。
電磁気を応用した様々な機器
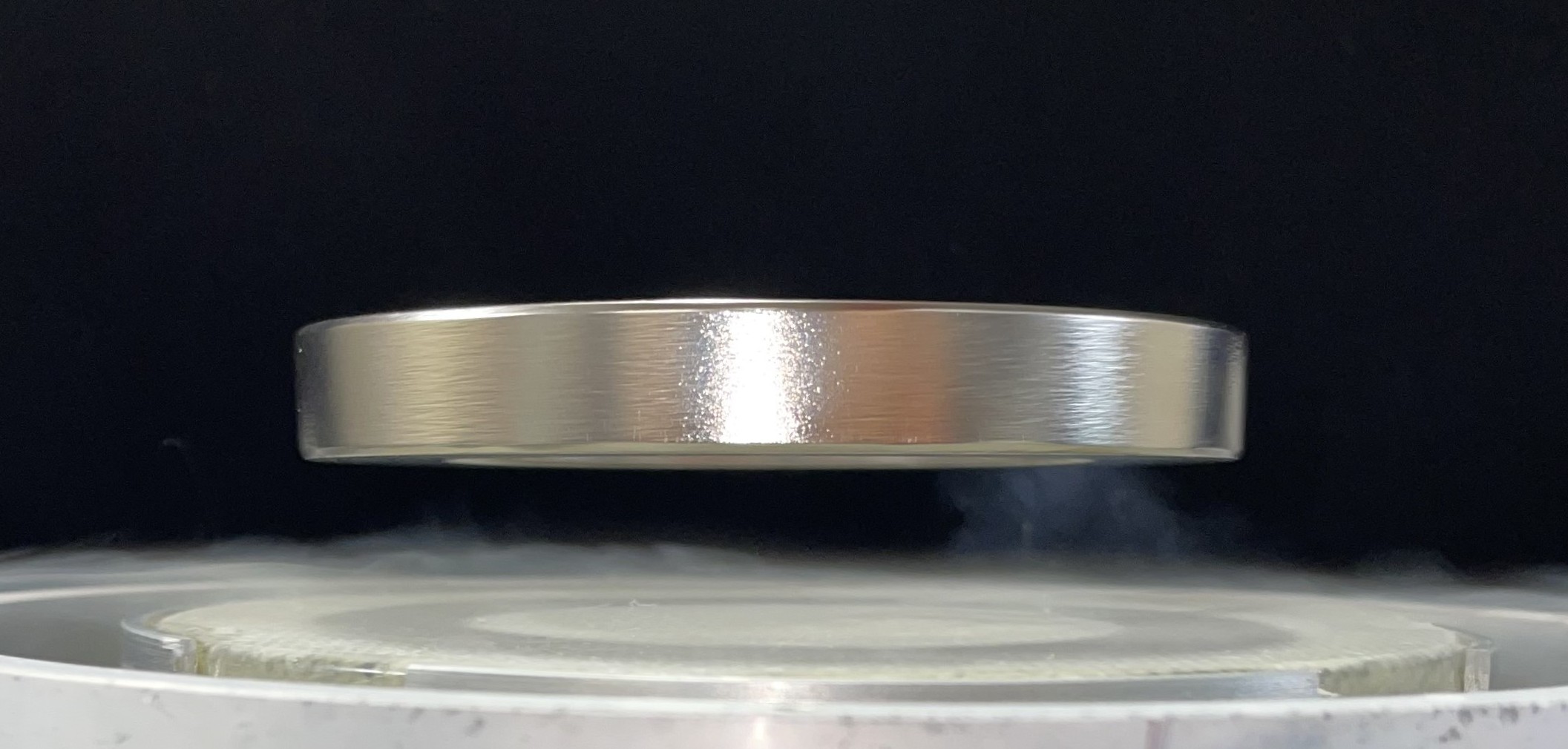
この電磁気を応用した様々な機器の研究開発を実施しています。例えば、超電導体と磁石を使うと、まるで物体が空中に拘束されているように安定して浮かせる事が可能です。この事を応用すると回転抵抗がほとんど無くなるので、長時間回転し続けるような円板が出来ます。回転している円板には運動エネルギーが貯まっていますからこれを好きなときに取り出す事が可能になります。この様な「電力貯蔵フライホイール」に関する研究や、強力な磁石を組み合わせ、より強力な磁場を発生させる事でとても大きな磁力を作り出し、他の機械要素と組み合わせて筋肉の瞬発力を再現したリニアモータを研究して跳躍するロボットや走れるロボットの開発を行っています。

| 研究キーワード | 高温超電導応用,電磁力応用,食品機械,ロボット,アクチュエータ,制振 |
|---|---|
| 研究分野 | 機械力学ロボティクス電気電子工学 |
| 主な研究テーマ |
|
| 研究概要 | 現在の主な研究テーマは,高温超電導体を応用した完全非接触磁気軸受の特性解析、またこの軸受を応用した電力貯蔵フライホイールに関する特殊なモータの構造の開発,駆動方法,制御,制振、解析等に関する研究を実施している。 |
|---|---|
| 提供できる技術 ・応用分野 |
|
| 主要な所属学会 | 日本機械学会,日本AEM学会,日本ばね学会 |
| 論文 |
|