私たちの身の回りには、目には見えないけれども重要な「状態」がたくさんあります。たとえば、機械の中で動いている部品のスピードや,電気自動車の電池の中の様子、時間を正確に刻む原子時計のズレなどです。また、設備の故障の兆しや経年変化も、実は「状態」としてひそかに存在しています。こうした見えない状態を、観測データから推定する研究に取り組んでいます。センサのデータをもとに、「このシステムはどう動くのか?」を表す数理モデルを構築し、「今、このシステムはどうなっているのか?」を推定します。このような技術は「システム同定」や「状態推定」と呼ばれ、科学技術や産業のさまざまな場面で活用されています。見えない状態を知ることは、システムを安全かつ効率よく動かすための第一歩です。現在の状態を正確に把握できれば、「どう操作すればよいか」という判断が可能となり、最適な制御につながります。最近では、人工知能(AI)や深層学習(ディープラーニング)などの技術も取り入れ、より複雑な現象に対応する研究も進めています。一方で、AIにすべてを任せるのではなく、物理法則や人間の知識と組み合わせて、なぜそうなるのかを説明できる信頼性の高いモデルを大切にしています。このように、データから見えないものを知り、モデルを使って世界に働きかけることで、より安全で、賢く動く社会やシステムの実現を目指しています。
.jpg)


| 研究キーワード | 制御工学,システム同定,状態推定,機械学習,人工知能 |
|---|---|
| 研究分野 | 電気電子工学情報工学 |
| 主な研究テーマ |
|
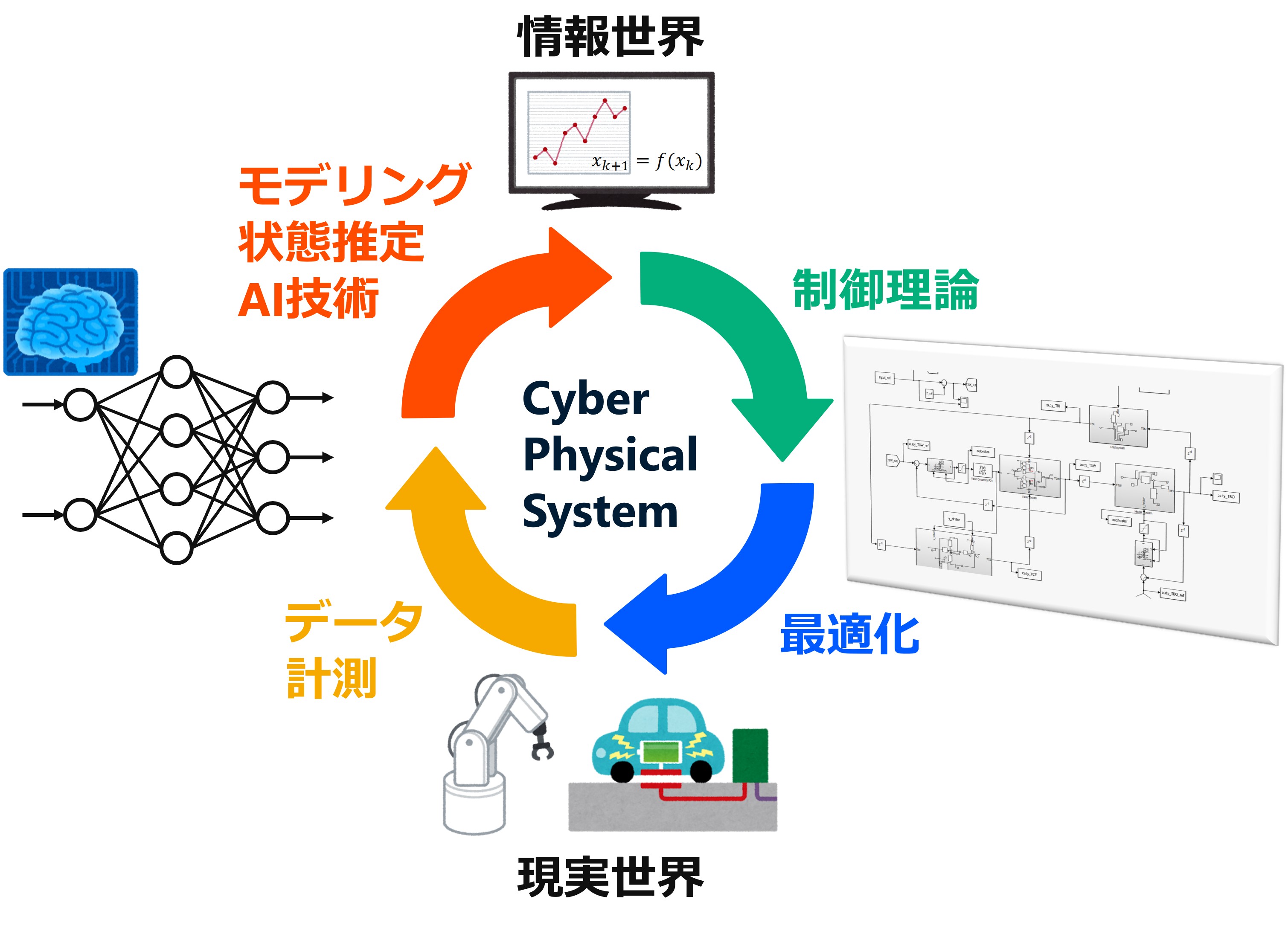
| 研究概要 | 観測データに基づいて対象システムのモデルを構築するシステム同定や、対象の内部状態を推定する状態推定に関する理論の研究に取り組んでいる。特に、対象システムの物理的な特徴や観測環境の制約を考慮した推定手法の開発を重視している。また、深層ニューラルネットワークや強化学習などの機械学習・人工知能技術を取り入れた制御系設計・システム同定・異常検知にも取り組んでいる。ブラックボックス的なアプローチに依存するのではなく、物理法則や制御理論に基づく構造的知識との融合によって、性能・安全性・ロバスト性に優れたモデルの構築を目指している。動特性をもつシステムに関するデータ分析全般を研究対象としており、これまでに、電気自動車向けリチウムイオン電池のモデリングと状態推定、エンジンや車両のダイナミクスのモデル化、原子時計群の状態推定と制御、さらには廃棄物処理プラントやモータ駆動系の深層学習による非線形モデル化などに取り組んできた。今後も、理論と実践をつなぐモデルベースの制御基盤の構築を目指し、制御工学と機械学習の融合による新たな制御理論の創出と産業応用に取り組んでいく。 |
|---|---|
| 提供できる技術 ・応用分野 | 制御理論,システム同定理論,状態推定理論,カルマンフィルタ,信号処理,機械学習技術,人工知能技術の産業応用 |
| 主要な所属学会 | IEEE,計測自動制御学会,システム情報制御学会,電気学会 |
| 論文 |
|
| 受賞歴 |
|